Arduino
-

放射性物質による汚染がまだまだ気になっておられる方に、キーホルダーサイズのガイガーカウンター「Doz…
東日本大震災の影響で炉心溶解を起こした福島第一原発からは大量の放射性物質が大気中に放出され、当時はみなさんも身近な環境に放射性物質がないか、食べている食品に放射…
-

キーストロークインジェクション攻撃を実際に実体験する事ができるUSBケーブル「HackCable」
誰もが、まさか自分のPCやスマートフォンが乗っ取られると言う様な事を考えたくはないかもしれませんが、実際に友達に借りたUSBメモリーを自分のPCに差し込んだら知…
-

フレキシブル基板を採用する事で丸めて使用する事もできるRaspberry Pi Pico互換ボード「…
RP2040はARM社が開発したデュアルCortex M0+のマイコンチップで、Raspberry Pi Picoにも採用されていますし、Raspberry P…
-
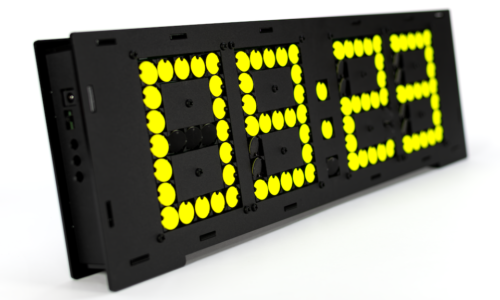
Arduino制御のパタパタと入れ替わるフリップディスクを使ったセグメントディスプレイ「Flip-d…
フリップディスプと言うのはオセロの駒の様に表裏で色が違ったりする円盤(ディスク)の事を指し、このフリップディスプは例えばバスの運行状況を示す掲示板などに使われて…
-

1.28インチの円形タッチパネルを搭載したRasPiやArduino等でコントール可能なロータリーエ…
マイコンを使った工作をしていると1番頭を悩ませるのが入出力です。最近でもメモリーをたくさん搭載してシリアル通信やI2Cが可能であれば、7セグLEDやOLED…
-

0.95インチOLEDディスプレイを使ったESP32-C3ベースの世界最小ゲーム機「PocketSt…
みなさんは”PocketStar”と言う0.95インチの極小ディスプレイを搭載したArduinoベースのゲーム機はご存じでしょうか?この”PocketSta…
-

ArduinoだけではなくRasPiやMicro:bitなど多数のマイコンボードで使う事ができるSP…
”Arducam”と言えばArduinoにSPIで接続できるカメラモジュールなのは言うまでもありませんが、この”Arducam”の登場はまさかArduinoと言…
-

ちょっとした空き時間に手軽に300種類以上の8bitレトロゲームがプレイでき、財布に入れて持ち歩ける…
最近レトロゲームブームなのか、バラエティーショップ等ではたくさんのゲームが最初からメモリーに入っているポータブルなゲーム機が流行っているだけでなく、アーケードゲ…
-

2.13インチ3色E-InkディスプレイオンボードのESP32マイコンボード「Inkplate 2」…
マイコンを使った制御装置や表示装置の開発において、デバッグなども含めて1番困るのが表示装置です。LCDキャラクターディスプレイは表示できる情報が限られてしま…
-

ミニチュア版スポットミニ(SpotMini)に姿勢制御機能が追加され転び辛くなった「Mini Pup…
ボストンダイナミクス社が製品化した四足歩行ロボットのスポットミニ(SpotMini)は、平地であろうが、ぬかるんだ場所であろうか、階段であろうが気にせず移動でき…