
「Parrot MINIDRONES」の発表があってからかなり気になっており、ようやくAmazonにて購入
ローター(プロペラ)と予備バッテリーも追加で購入した。何せ、プロペラは落とせば割れる事必須。
バッテリーは1時間半充電して7~8分のフライトってのだから、ちょっと遊ぶのにも物足りない

さっそく、開封の儀。期待を保護する!?天井や壁や床を走行させる時に使うホイールは蓋についている
アダプターに差し込んで固定されていました。オシャレぇ~
テープやモール類は一切使わず(バッテリーだけ粘着ジェル!?でくっつけられていましたが、後は台紙を
うまくカットして固定されていました

部品一覧です。説明書に操作の仕方等は書いておらず、webで学習です。
マニュアル類は下記URLにあります。
http://www.parrot.com/jp/support/parrot-rolling-spider/

ヘッド部分です。イメージはクモなのかなぁ~?
お尻!?から見た所。ここにバッテリーをー差し込みます。
そしてMicroUSBコネクタ。通信も可能で、PCに接続するとドライブとして認識され、撮影した
画像を直接、PCにコピーしたり削除したりできます。
またファームウェアのアップデートは、webから最新のファームをダウンロードして、PCに接続
した状態でファームウェアのファイルをMINIDRONESにコピーする事によりアップデート可能です
なので宙返りとか側転とか、プリセットさせていますが、それらモーションが今後増える事も考え
られます

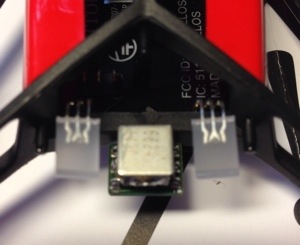
そして下部。丸いメッシュのかかったスピーカーっぽいものが、送受信回路内蔵の超音波センサー。
通常、DIYで使うのは送信部と受信部が分離したものを使いますが、重量も重くなり、センサーが占める
基板面積も増えるので一体型のものが使われています
その下の黒い穴!?みたいなのはCCDカメラです。
そしてこの画像で右下。フレームがちょっと突起している部分がありますが、ここが電源のON/OFFスイッチです
目の部分!?のLEDの点灯を確認して、使わない時はボタンを押してOFFしておきましょう。
※物理的なスイッチではないので、押してすぐ電源は切れません。LEDがフェードアウトして電源が落ちたのが
確認できます

さぁ~~~~~て!!ここからが、メインです。
1度もフライトせずに、出して即、分解です(笑)
ヘッド部分は差し込んであるだけなので、前方に抜けば簡単に外れます
下部のカバーはプラスネジ4本で固定されているだけなので、プラスネジを4本外せば簡単に外れます

カバーを外したところ。基板の裏側!?
裏側には超音波センサーとCCD以外に目立ったCPUは乗っていません

ヘッド部分。2個の2色LED(緑、赤)の間に9軸センサーと思われるものが乗っております。
小型のジャイロかな?
メインCPUは完全にカスタムチップです。Parrotの文字が見えます
ARMロゴも印刷されているのでARMプロセッサ搭載
モータードライバ-はLEDの側のヤツかなぁ~
CPU脇のはメモリーっぽい

操縦はスマホで「FreeFlight3」をダウンロード
基本モードでのフライトは左のスティックの上下で、上昇下降。
左右で旋回。
スマホを方向ける事により、前進後退。左右への移動を行います。このスマホのセンサーをOFFにして
画面上のスティックで操作するモードも用意されていますが、基本、方向けて操縦する方が分かり易いと思います
でもまず最初は操作方法を覚えるまではホイールつけて飛ばした方が無難かと思いました










この記事へのコメントはありません。